今回、ヘラクレス赤道儀をパルスする際、スカイセンサー用のモータとサイズがほぼ同じのモータを選択しました。オリエンタルモーターの中で、ヘラクレス赤道儀に収まるモータをチョイスして頂きました。ただ、スカイセンサー2000PC用のモータとこのモータでは、2点違う点がありました。
1.モーターの固定の仕方
スカイセンサー2000PCのモーターは、固定するプレート側にタップを切ってネジで固定するか、プレートに穴を開けて、ボルトとナットで固定する方法で固定しますが、オリエンタルモーターはモータにタップが切ってあるので、プレートの反対側からネジで固定する方法しかありません。
2.モーター軸の直径
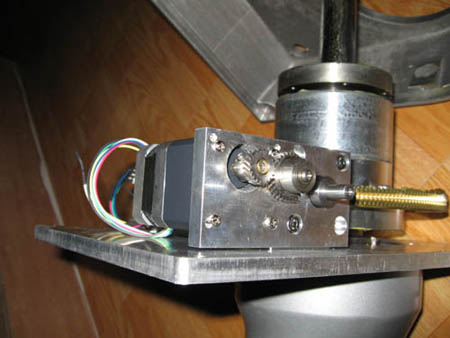
モーター軸の直径が、オリエンタルモーターの方が細いです。なので、ギヤとモーターの軸の間にシンチュウのリングを挟んで軸の中心がズレないように加工して頂きました。

モータ側からネジ止めされてます
オリエンタルモータは逆側からモータに対してネジ止めします
赤道儀が何ppsになるか?何倍速出るか?等を求めるには、下記の情報が必要になります。
1.ウオームホイルの歯数
2.減速ギヤ比
3.選ぶモーターヘッドの減速比
意外にわからないのが「2.減速ギヤ比」です。どうしてもわからない場合は、このように実際の赤道儀の歯数を数えればわかります。
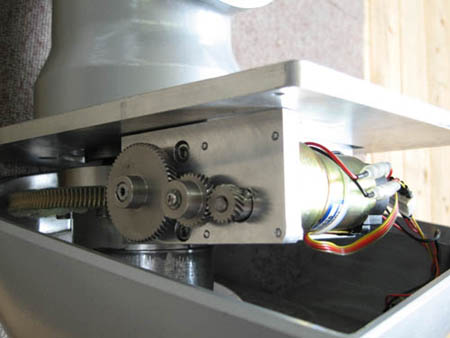
ヘラクレスの様に3個ギヤがある場合は、真ん中の伝達ギヤの歯数は無視して下さい。ヘラクレスの場合は、60/20でした。
さあ、計算です。
195(ウオームホイルの歯数)×3(減速比)×9(モータヘッドの減速比)×200(ステッピングモータ仕様)×8(マイクロステップ)=8424000
8424000÷86164=97.8
私の赤道儀に1/9.0ヘッドのモーターを選んだ場合、97.8pps出る事がわかりました。
さあ、倍速です。高速時の周波数は24000ppsで出荷されるとの事でしたので、
24000÷97.8=245倍
なかなか私好みの数値が出ました。このモータに決めました。
