パルス化を検討し始めた時に、朗報が…。
東京のCANP(CANのオフ会でユーザー同士が情報交換をする会)で、GPD赤道儀のパルス化のデモ見ましたよ。
何でもモーターを変えればトン級の赤道儀でも動くそうですよ。
何だって?モーターを変えればトン級赤道儀でも動く。こりゃ、真偽を確かめねば…。製作者は、T氏。なっ!何だ!T氏だったのか。面識あるし、こりゃ是非にでもアポイントをとらねば。
善は急げって事で早速T氏に連絡をとり、私の希望の5つの条件を提示。その結果は…。
<パルスモーター化計画で譲れない条件>
1.高速が280倍速なので、最低でも200倍速以上は欲しい。
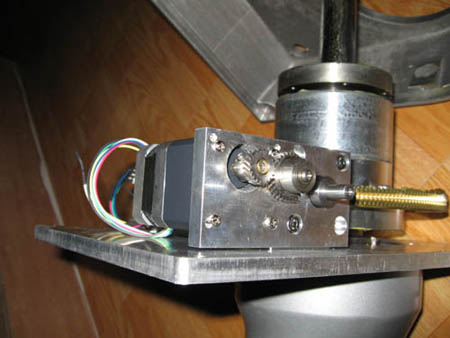
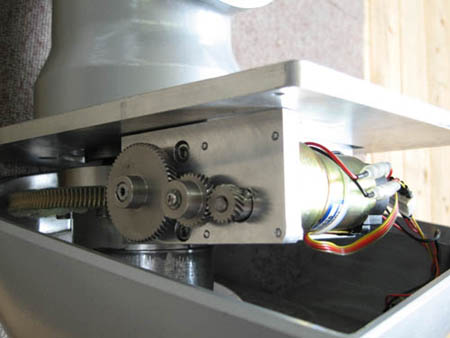
選択するモータのギヤヘッド、伝達ギヤの減速比、ウオームホイールの歯数等でヘラクレス赤道儀の場合、赤道儀に収まるモーターの選択肢で下記のようになりました。
ギヤヘッド/日周運動/16000/20000/24000pps
1/9.0 97.8pps 160倍 200倍 240倍
1/7.2 78.2pps 205倍 256倍 306倍
1/3.6 39.1pps 410倍 513倍 612倍
1/7.2ギヤヘッドか1/9.0ギヤヘッドのモーターが良さそうです。
2.日中の太陽観察時に星でアライメントがとれないので、アライメントを維持するシステムが欲しい。
YOCと呼ばれるソフトはアライメントを保持する機能が標準で装備されているので、次回電源投入時に、「継続」を選択すれば、赤道儀が向きを見失わないとの事。
3.ppsなんて言葉が良く出てきて、高ければ高いほど良いなんてネタも良く聞く。最近の赤道儀のスペック表と睨めっこ。良くはわからんが100ppsは譲れないなぁ?
マイクロステップも、正確に動作するモータが少なく、この辺りで誤解が生まれている可能性があるようで、正しく48pps以上の能力が出れば、充分赤道儀としても成り立つそうです。でも、選択肢として100ppsに近い値の出る1/9.0ヘッドのモーターもあるし、これもクリアかな?
4.子午線問題。スカイセンサーは子午線過ぎてある程度したらピ~!と鳴って、ハイ反転。オイオイ。一番美味しいところじゃないか。こりゃ絶対に何とかせんとなぁ。
駆動中は、一切の警告無し。逆に居眠りしたら危ないなぁ~。導入時には、反転導入かそのまま導入か選べます。これまた便利。冬場は太陽の観察正午前後にする事がおおかったので、ホント助かりますねぇ。
5.そうそう。星座ソフトと連動したらカッコいいなぁ~。天文台だし、何か本物っぽくていいなぁ。
YOCでも星座ソフトっぽいのですが、もっとリアルなソフトもあります。SUPER STAR IVと言うソフトです。ただ、SUPER STAR IV(有償)の場合は、アライメント保持機能がありません。移動派の方は選択自由ですが、据付派にはYOCですね。
あれ?何だかんだ言っている間に、全ての条件クリアしちゃっている。これは是非、改造しなければ…。って事で、T氏に連絡をとって早速改造依頼をば…。